1、材料:

2、我用 STC12C5A单片机试和用洞洞板焊了一块18路舵机驱动板:(焊工不熟练,莫笑。)注意:普通51单片机的驱动能力较小,可以加上上拉电阻。(如图)

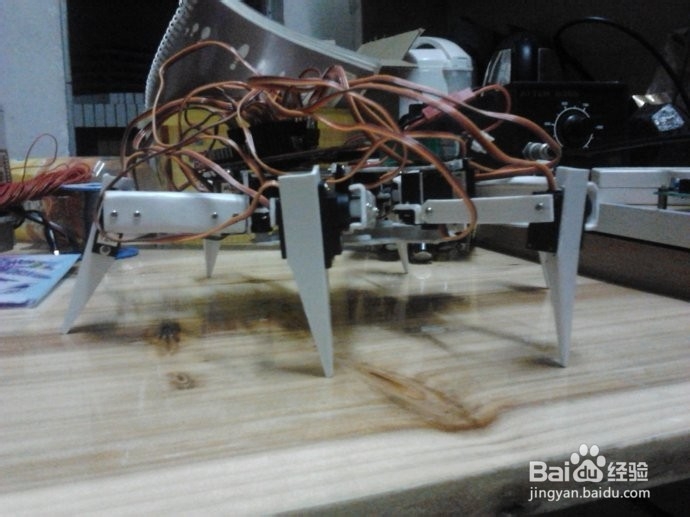
3、用PVC线槽做了关节,按上舵机:结构如图:



4、同时驱动18路舵机,都保持在90度的位置,插上电池,我的蜘蛛机器人站起来了。要检测一下舵机的实际角度,再调一下舵机与支架的夹角,使六足整体看来动作平衡。
5、俯视图:

6、改进了一下支脚,防磨损,减少噪音。

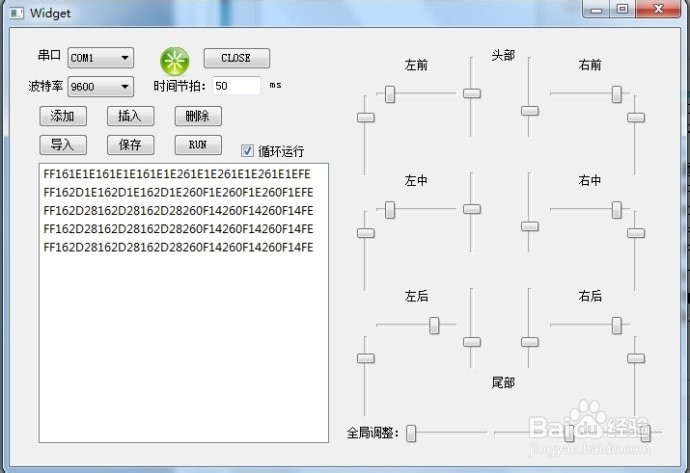
7、程序部分: 舵机:舵机由一个20ms为周期的脉冲信号驱动,脉冲信号的高电平时0.5m衡痕贤伎s~2.5ms对应0°~180°,一个舵机的控制焊剑杂锭参数为一个字节,理论控制精度能够达到180°/256=0.7°,但是20ms的PWM信号实际上是由下位机单片机产生,受限于单片机的时钟速度,所以将精度下调为180°/40=4.5°,在完成整体方案之后,再从其他方面考虑提高控制精度。每个字节从0x0A~0x32对应舵机的0°~180°,如下表:(例如发送指令使机器人每个舵机转到90°处于站立状态,发送数据如下:FF1E1E1E1E1E1E1E1E1E1E1E1E1E1E1E1E1E1EFE(十六进制))

8、电路原理图:(我用Altium Designer画的,生成PCB文件去公司定制的,10cm ×10cm的板子,50元10块(最少订10块))

9、电池部分:(为了减少重量,舵机和单片机共用一块电池,用7085稳压器)

10、写上位机:(我用QI写得,整洁吧)