1、我没有使用Arduino板上的5V电压,而是单独用了一块稳压扩展板。该扩展板在小车调试前期可不用,直接用稳压器给网络摄像头提供电源。

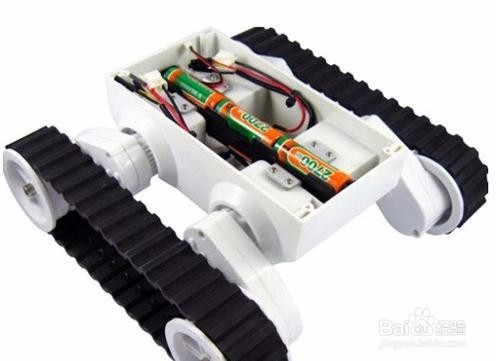
2、小车底盘(2WD /4WD)是路虎5履带底盘。最后找了一个直插的10k电阻,再准备一些面包线,这样所有的材料都准备好了。
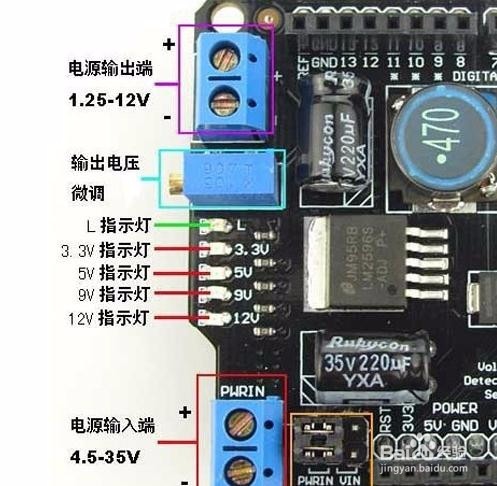
3、 使嫔縻璧稳压扩展板的使用很简单,我们先来简单介绍一下。如下图的标识,将电池接到扩展板的输入端子,输入端子旁边的两个跳线帽要跳到PWRIN位置。然后调节输出电压微调电位器,用万吹涡皋陕用表测量电源输出端电压使其稳定在5V。最后将网路摄像头电源接口与扩展板电源输出端连在一起。
4、 蝮舟湛搁至于电机驱动板的使用相信大家都比较熟悉了,这里再简单提两句。先要选择控制方式,这个制作中使用的是PWM菱诎逭幂方式。再者就是连接直流电机,如下图所示的连接端子。M1+和M1—连接一个直流电机,M2+和M2—连接另一个直流电机,电机驱动板占用Arduino的4、5、6、7脚。

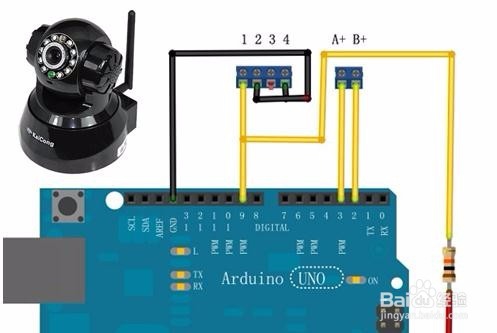
5、本人采用的方式是直接用Arduino捕获摄像头内控制步进电机的信号,拆掉了摄像头中左右转的步进电机,用摄像头本身左右旋转的信号来控制小车的左右转,而用继电器的吸合来控制小车的前进与停止。

6、这样当继电器未吸合时,9脚因为上拉电阻,所以状态为高;而当继电器吸合时,9脚接GND,所以状态为低。网络摄像头报警接口的4函讳雍蛾脚也要连接到Arduino的GND,以使网络摄像头控制板与Arduino共地。A+与B+分别连接到Arduino的2、3脚,这两个脚如果连反了可以在程序中调整。
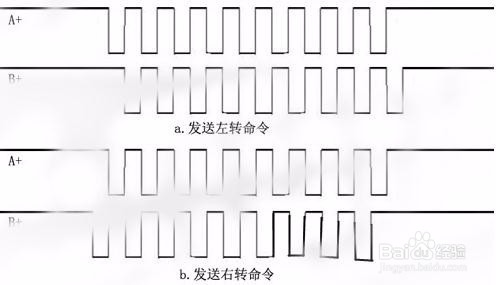
7、步进电机的控制方式是不断的变化A、B两相上的电压大小和电流方向,这样在A+和B+上就会产生一串脉冲。使用示波器观察我们发现,当发送左转的命令时,首先在A+上产生脉冲,而当发送右转的命令时,首先在B+上产生脉冲,效果如下图所示。