1、1)打开接触管理器,点击Preprocessor>Modleing>Create> contact Pair对接触对进行求解前设置:
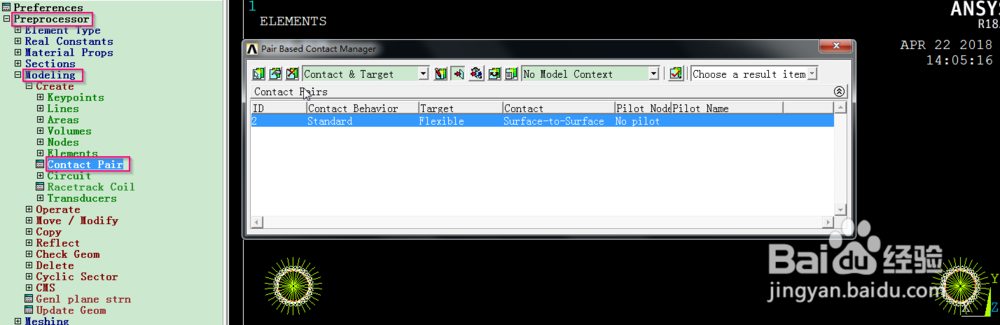
2、2)单击接触对初始接触调节面板,点击下图小手图标:

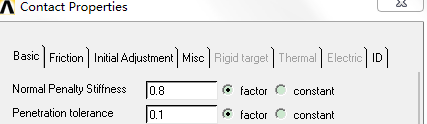
3、3)设置接触单元的法向刚度Normal Penalty Stiffness=0.8(默认刚度设置为1),在接触分析中,很多不收敛问题是由于接触刚度过大引起的!(如果遇到收敛问题,可以尝试减小接触刚度FKN在0.01~0.1之间),初始接触容差=0.1如下:
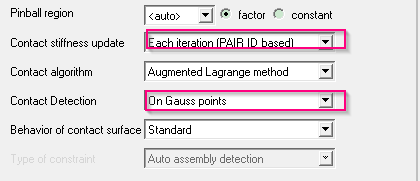
4、4)设置Contact stiffness update为每个迭代步(虽然更新刚度会降低求解速度但是,会提高收敛性),采用增广拉格朗日算法、采用高斯点进行接触探测:
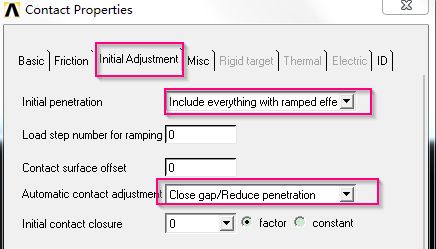
5、5)点击Initial Adjustment面板,对两个物体的初始状态进行定义,Initial penetration=3;Automatic contact adjustment=Close gap/Reduce penetration,点击OK:
6、6)施加简支约束和简支梁上表面的均布荷载:

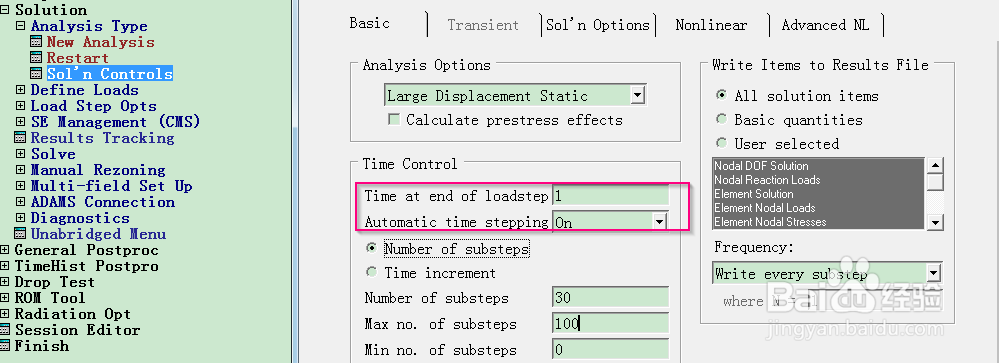
7、7)点击Solution>Analysis Type>Sol'Contrals,设置30个荷载子步,打开自动时间步长,如下:
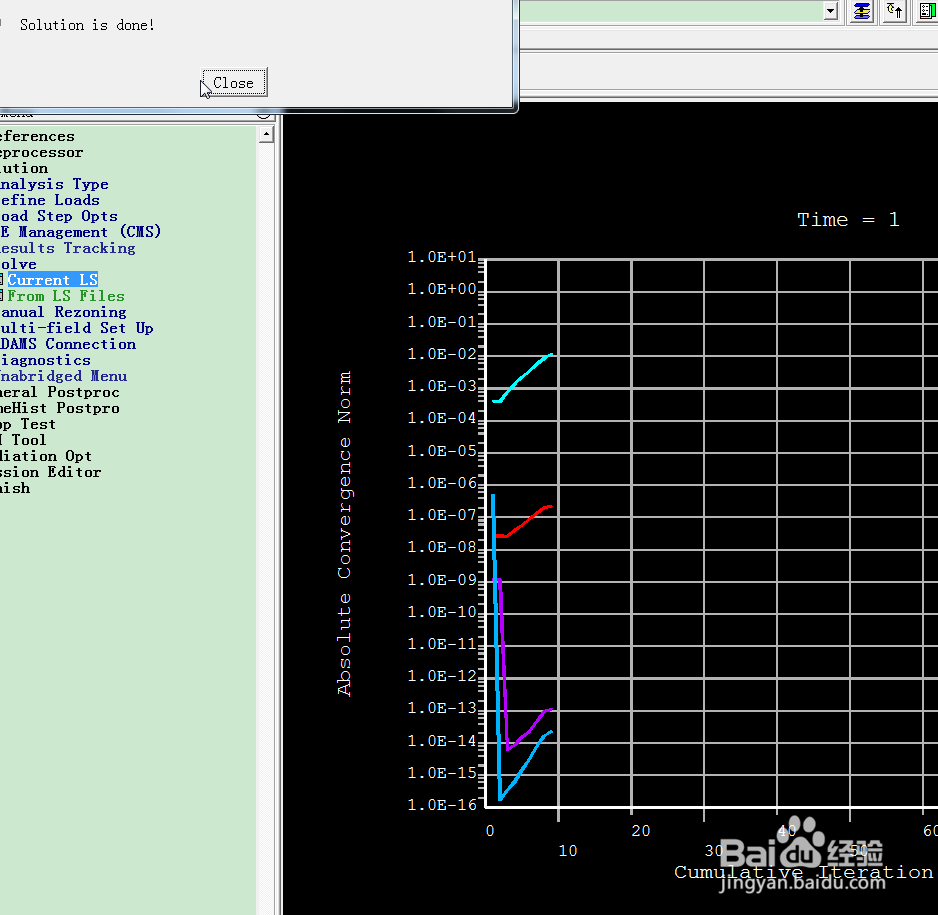
8、8)点击Solve进行接触非线性求解,设置良好,求解很快的完成: