1、首先新建运动仿真。然后对小球和连杆创建连杆特性和旋转副。然后设置解算方案。
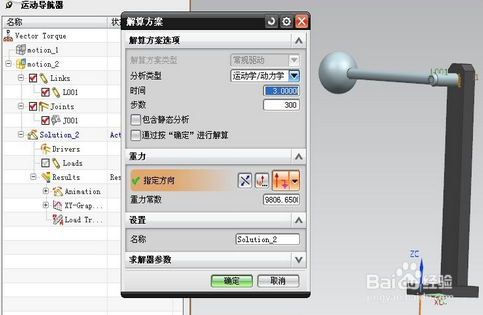
2、单机“运动”工具栏的【矢量扭矩】工具按钮,或选择菜单中的【插入】-【载荷】-【矢量扭矩】命令,打开“矢量扭矩”对话框,选择连杆,在视图区选择L001,如图所示:

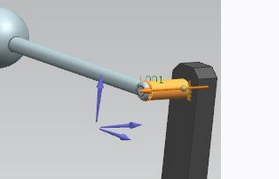
3、单机【指定原点】按钮。在视图区选择L001上转轴圆心一点为原点,如图所示:
4、在【幅值】选项卡,单机【类型】下拉列表框,选择函数类型,如图所示。单机“函数”下拉谱驸扌溺列表框,选择函数管理器类型,打开"XY函数管理器"对话框,如图所示:
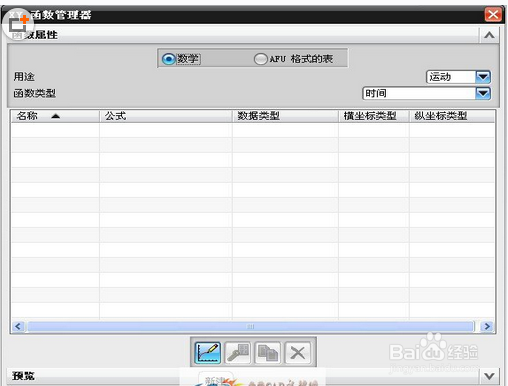
5、【插入】下拉列表框,选择运动函数类型。并选择STEP类型。单机添加按钮,加入STEP函数。在公式文本框,修改STEP(x,0,0,3,50),如图所示。

6、继续使用以前的解算方案,对设置重新求解,完成后单机【播放】按钮,运动仿真动画开始。单机“动画控制”工具栏的【完成】工具按钮,完成当前模型的动画分析。