1、一般PID控制器在仿真中的参数设置如图。

2、自适应模糊pid控制系统框图。

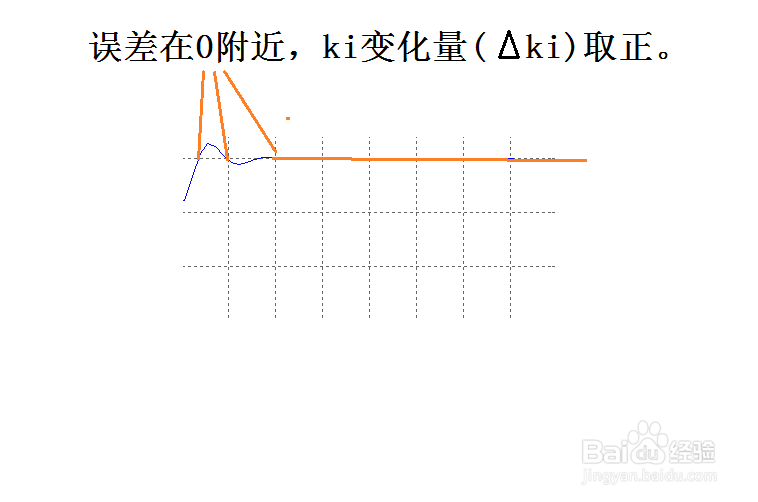
3、采用积分分离策略:1.误差在0附近,ki变化量取正。
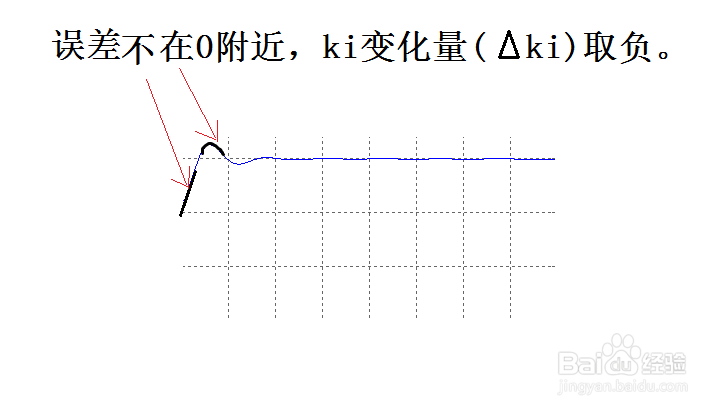
4、采用积分分离策略:2.误差不在0附近,ki变化量取0。
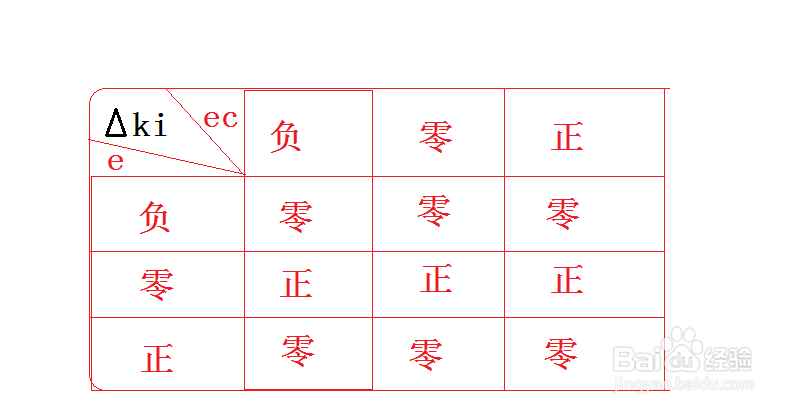
5、Ki整定原则模糊规则表如图。
时间:2024-10-18 07:09:32
1、一般PID控制器在仿真中的参数设置如图。
2、自适应模糊pid控制系统框图。
3、采用积分分离策略:1.误差在0附近,ki变化量取正。
4、采用积分分离策略:2.误差不在0附近,ki变化量取0。
5、Ki整定原则模糊规则表如图。
