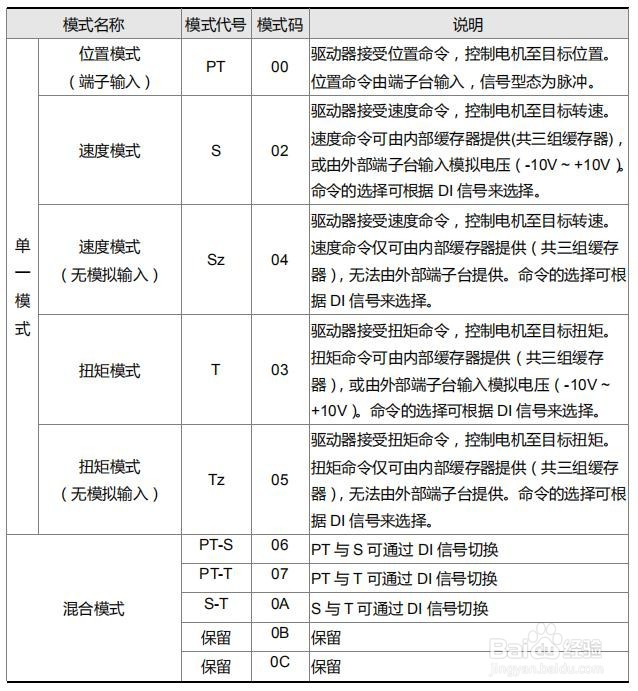
1、下图为驱动器所提供的所有控制模式,下面我们对每一种模式进行说明。
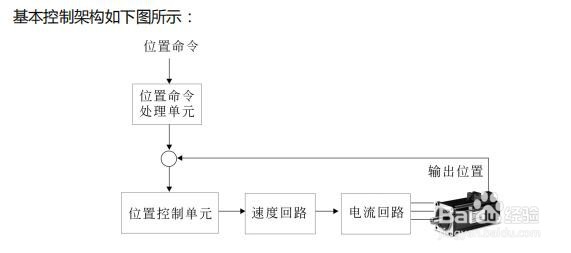
2、位置控制模式的基本架构如下图,位置命令可由外部脉冲提供。
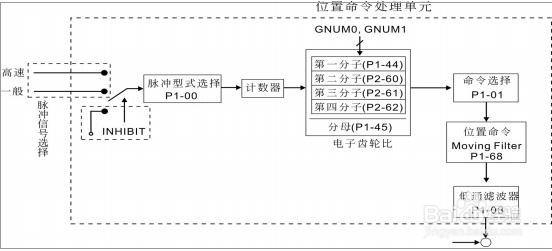
3、为了达到更完美的控制效果,将脉冲信号先经过位置命令处理单元作处理与修饰,该架构 如下图所示:
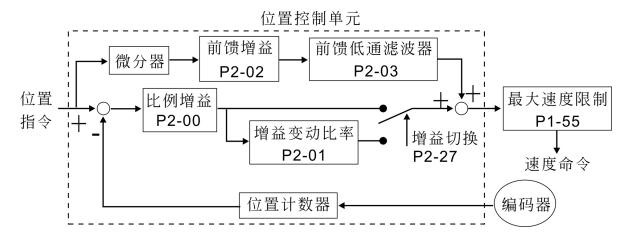
4、在设定位置控制单元前,因为位置环的内环包含速度环,用户必须先将速度控制单元以手 动钱砀渝测(参数 P2-32)操作方式将速度控制单元设定完成。然后再设定位置环的比例增益(参 数 P2-00)、前馈增益(参数 P2-02)。或者使用自动模式来自动设定速度及位置控制单元 的增益。位置增益环路入下图所示
5、速度控制模式的基本架构如下图,速度命令可由外部模拟量提供。
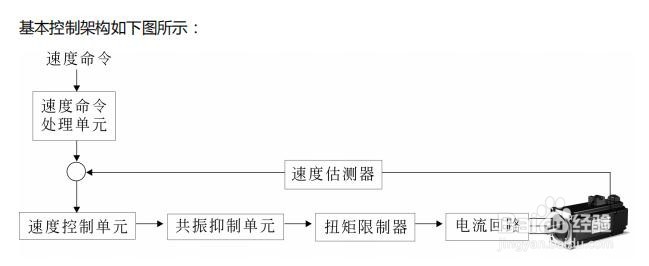
6、首先介绍速度命令处理单元之中的功能,架构图如下所示:
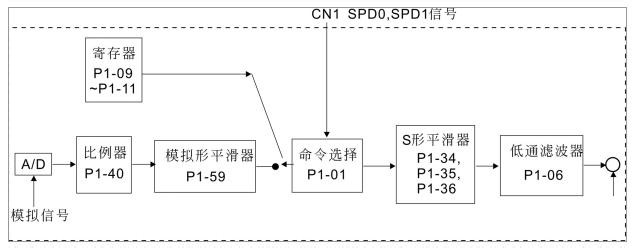
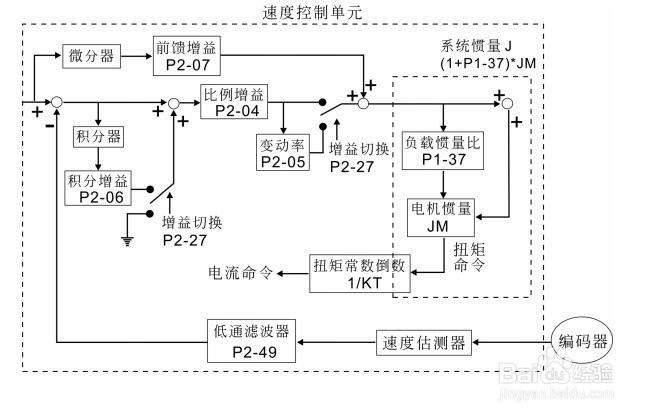
7、速度控制单元之中有许多的增益(Gain)可以调整,而调整的方式有弛阻廖娓二种(手动、自动) 可供使用者来选择。手动:由使用者设定所有参数,同时所有自动或辅助功能都被关掉。自动:提供一般估测负载惯匪犬挚驰量且同时自动调变驱动器参数的功能,其架构又可分为 PI 自动 增益调整及 PDFF 自动增益调整。
8、速度环增益控制单元的架构如下图所示
9、扭矩命令的来源分成两类,一为外部输入的模拟电压,另一为内部参数。其基本框架如下图所示

10、扭矩命令除了可在扭矩模式(T 或 Tz)下,当作扭矩命令,也可以在速度(S 或 Sz)模式下,当作扭矩限制的命令输入。
11、除了单一操作模式以外,本驱动器亦提供混合模式可供运用,混合模式共有五 类八种。

12、改变模式的步骤如下:1. 将驱动器切换到 Servo Off 状态,可由 DI 的 SON 信号 OFF 来达成。2. 将参数 P1-01 中的控制模式设定填入上表中的袷蜍滇刷模式码,可参阅第七章的明。3. 设定完成后,将驱动器断电再重新送电即可。
