机器人如果总是一动不动,略显死板,如果能让它行动起来,会更加有趣。那么,如何让机器人按我们的要求移动呢?
工具/原料
诺宝RC
来回直行
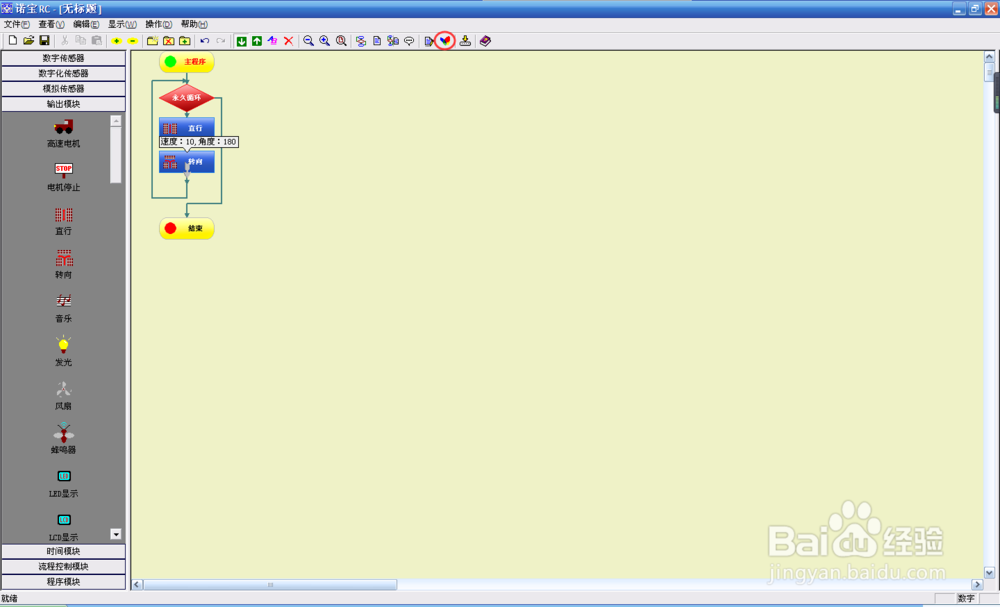
1、首先要点击“流程控制模块”中的“永久循环”,这样机器人除了没电以外就不会停止运动。

2、然后添加“输出模块”中的直行和转向,让机器会行走并转身。

3、双击“直行”程序,设置好移动速度的时间,然后点击确定。

4、双击“转向”程序,设置转动角度为180度,速度可任意调整,但要注意左右转向。

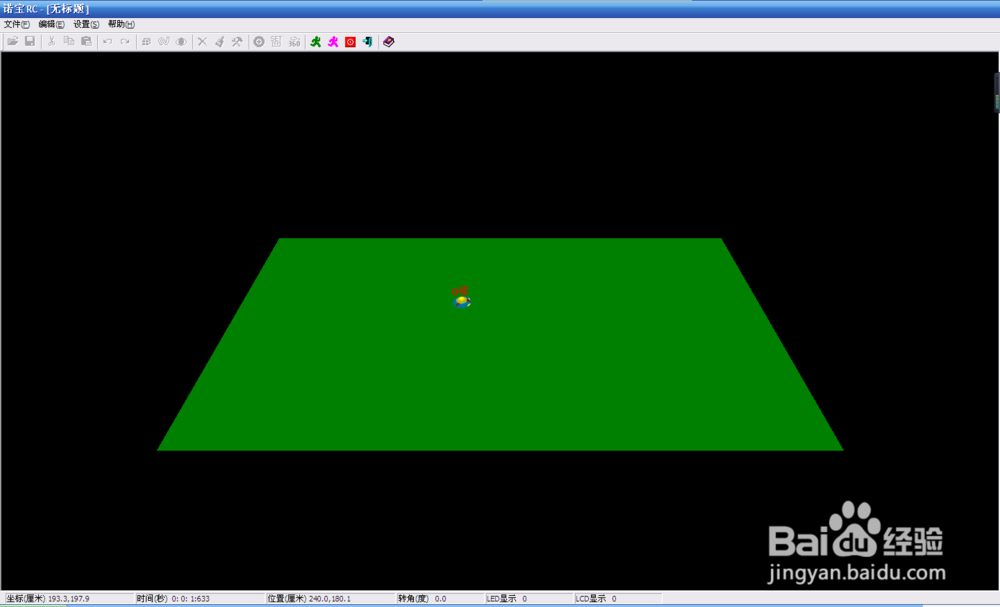
5、然后点击仿真按钮,进入仿真页面。

6、点击“仿真”或“3D仿真”即可测试机器人移动了。

走正方形路线
1、方法和来回直行一样,只需用双击“转向”程序,将转动角度修改为90度即可。

走长方形路线
1、和上面依旧相同,不过要如图再添加一次“直行”和“转向”。“转向”的转动角度都是90度。

2、两个“直行”程序的直行时间就可任意调整,但不相同,它们的数值分别是长方形的长和宽。

