机械手转动特性试验
一、实验目的:
通过采集机械手在旋转过程中电压值的变化,从而得到旋转角度。
二、实验要求:
旋转机械手,从0°~180旄嬷稳晴°不间断的旋转,同时采集旋转角度。
三、实验设备:
角位移传感器、工控机、采集卡、端子板、直流电源、机械手臂等。
四、实验步骤:
(1)将传感器与机械手臂相连接。然后正确的将传感器连接到直流电源、采集卡和端子
板连接到工控机上;
(2)开启电源,启动工控机;
(3)编写程序,调节参数;
(4)运行程序,采集数据;
(5)数据采集的参数设定
如图1.1所示为,机械手臂转动特性试验的程序图。
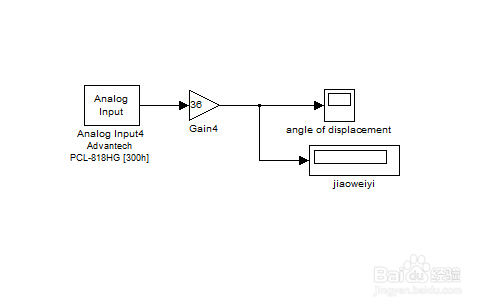
图1.1机械手臂转动特性试验的程序图
如图1.2所示,首先设定程序工具栏中simulation中的Model Configuration Parameters中的基本设置参数,求解器Solver选择ode5(Dormand-Prince),Start time为0,Stop time为inf,Type选择Fixed-step,Fixed-step size为0.01,其他均默认选项。
1.2模型配置参数设置
如图1.3所示,角位移传感器的模拟输入模块Analog input中,Board setup选择Advantech PCL-818HG[300h],Sample time为0.01,input channels为7,input range选择-5to5V,其他默认。增益Gain设定增益值为36,如图1.4所示。 图1.3
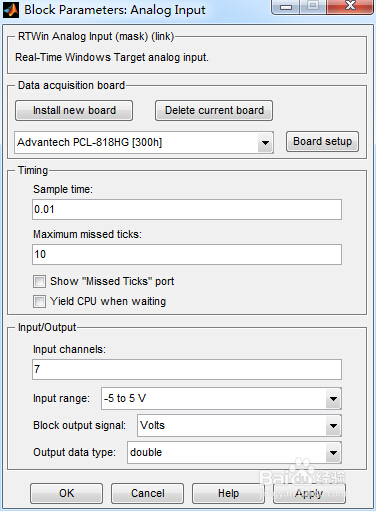
1.3模拟输入模块参数设置

1.4增益值设置
(6)实验结束后,保存数据,关闭实验台,关闭电脑和电源。
五、实验结论:
如图1.5所示,旋转角度随时间的变化曲线:
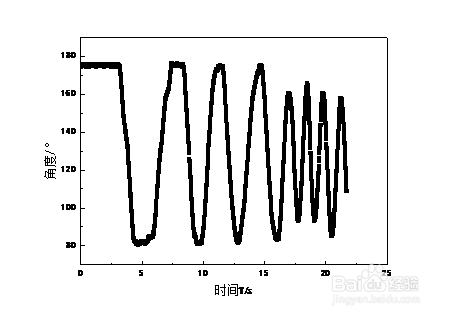
图1.5旋转角度随时间变化曲线
在图1.5中可以得到:在前10s时,机械手臂的旋转速度较慢,10s后,机械手臂的旋转速度明显变快,且在一定角度的范围内来回旋转。
