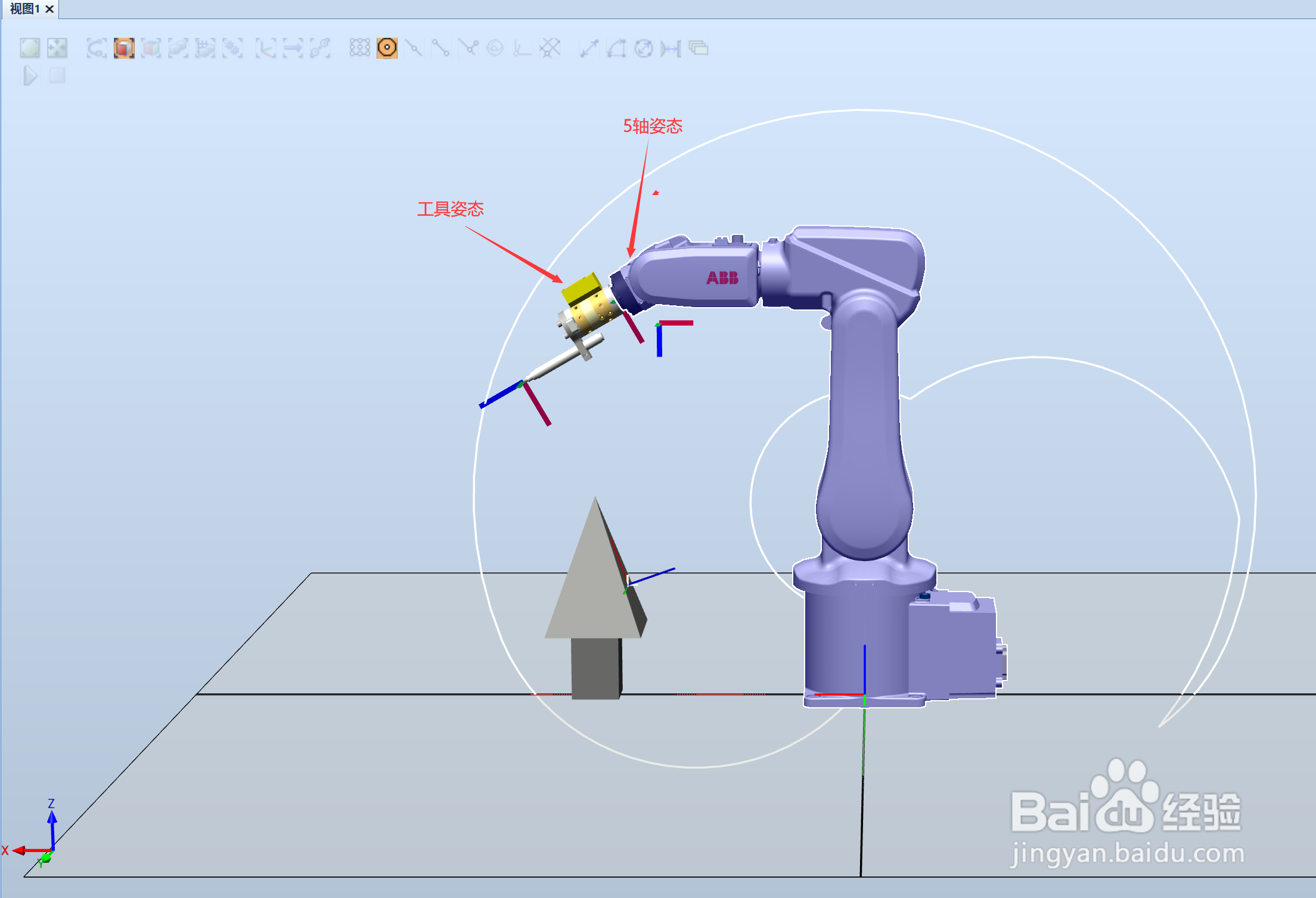
1、机器人初始位置,注意机器人工具和第5轴的姿态。
2、启动虚拟示教器,【控制器】—【示教器】—【虚拟示教器】。

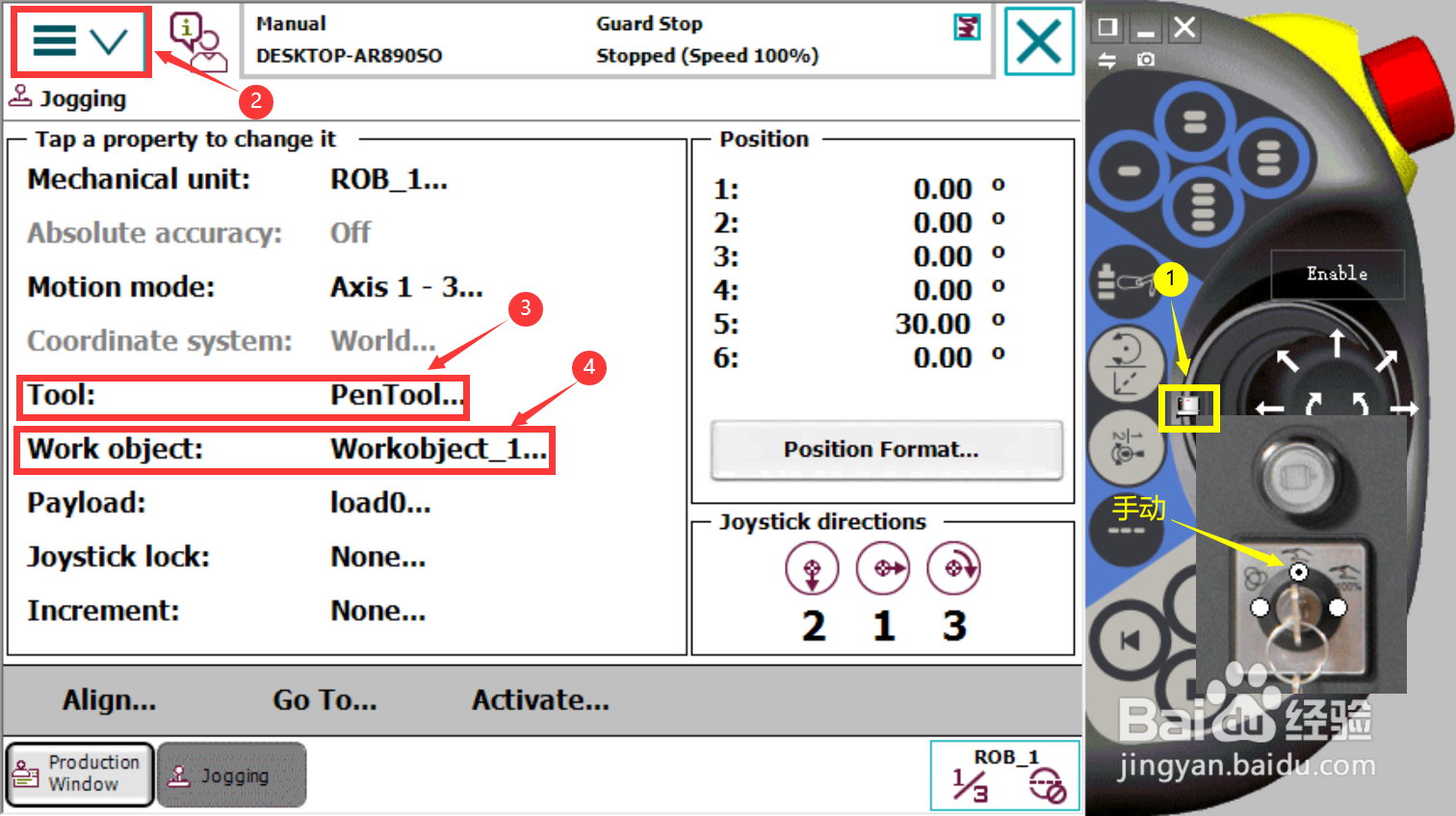
3、调试虚拟示教器,【自动/手动】—[切换至手动]—左上角【下拉菜单】—【工具】—【工件坐标系】。
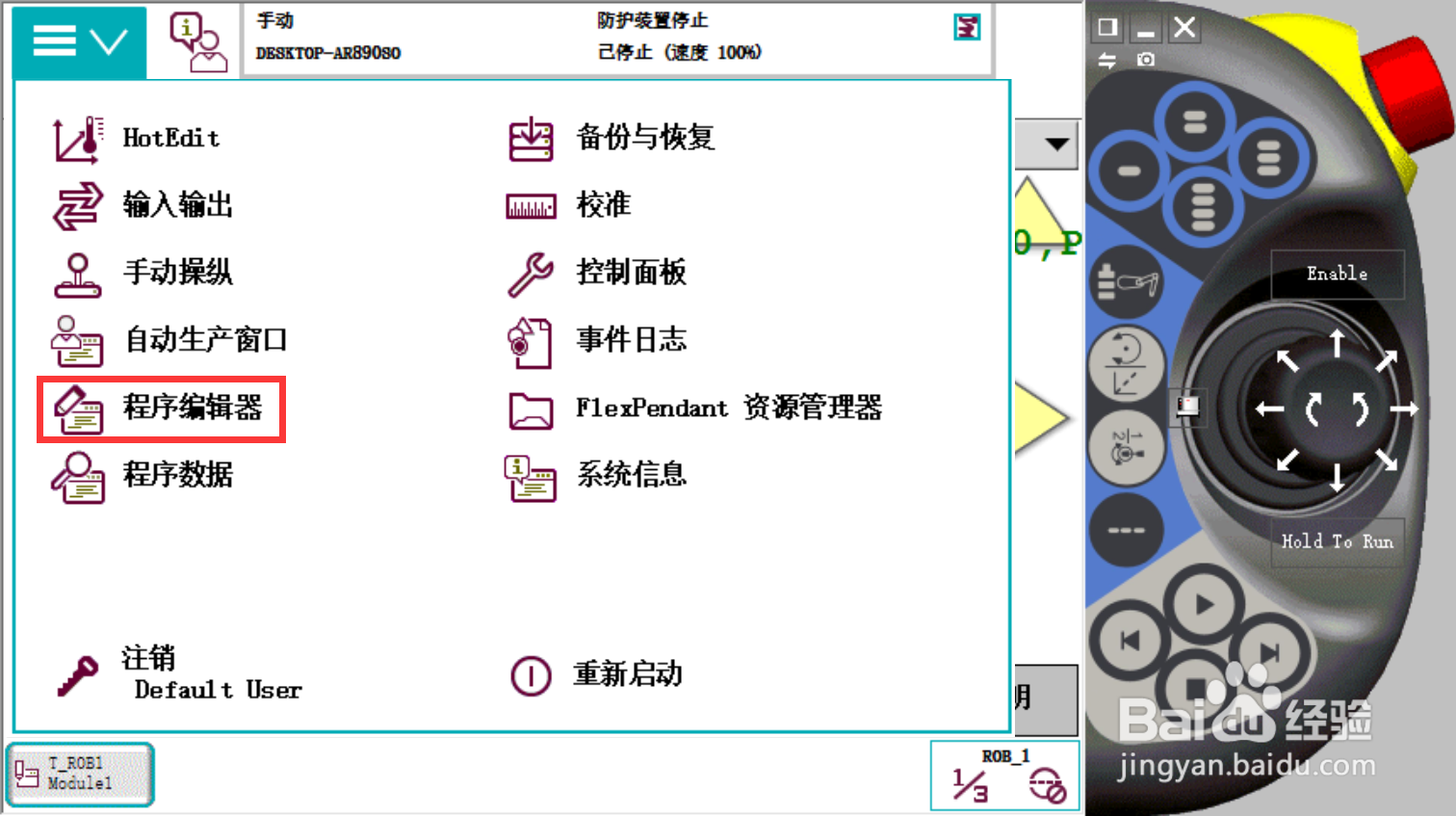
4、进入【程序编辑器】。
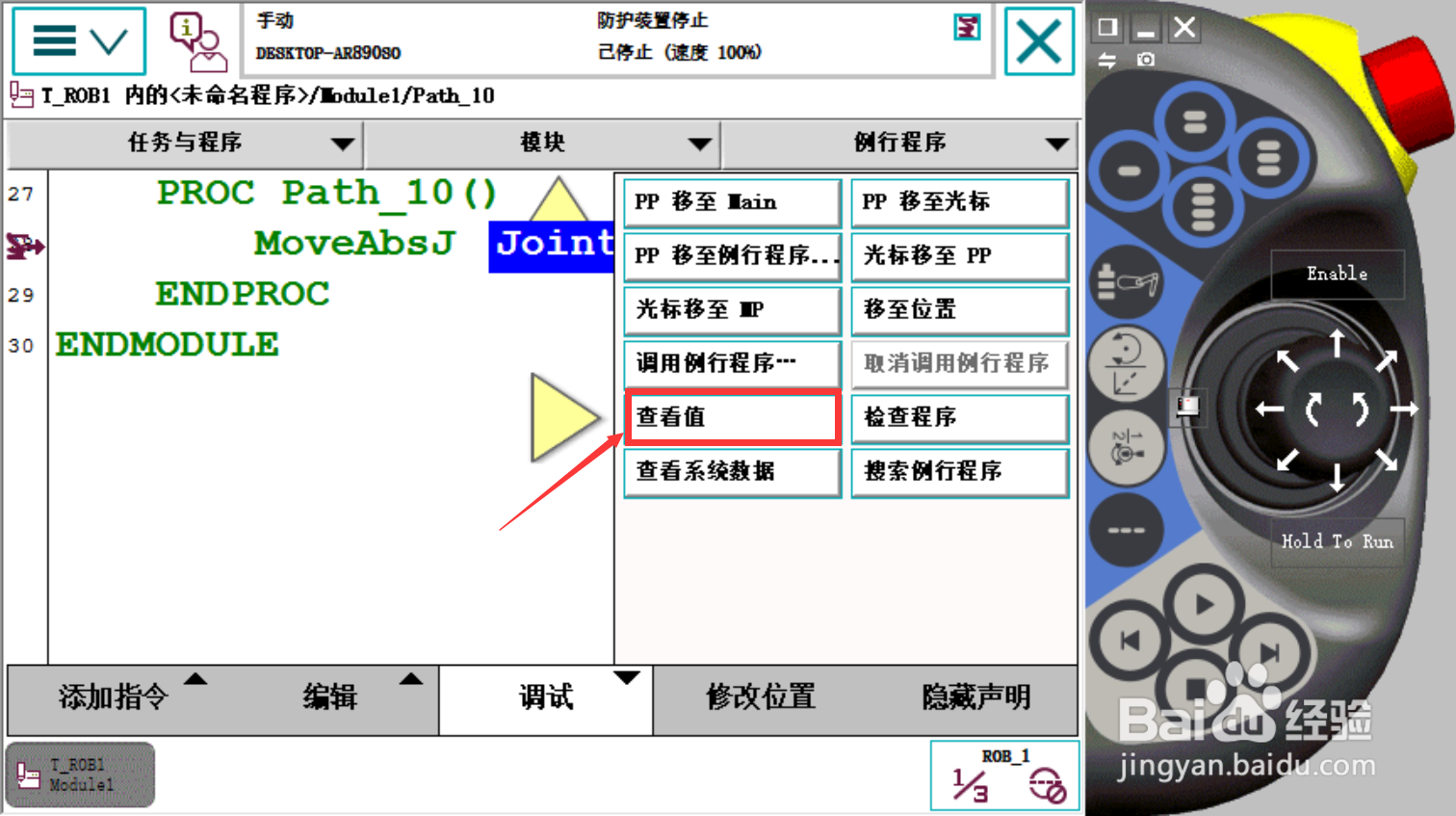
5、选中【JointTarget_1】—【调试】。

6、选择【查看值】。
7、查看机器人当前六个关节的值。

8、修改机器关节值至Home点位置。
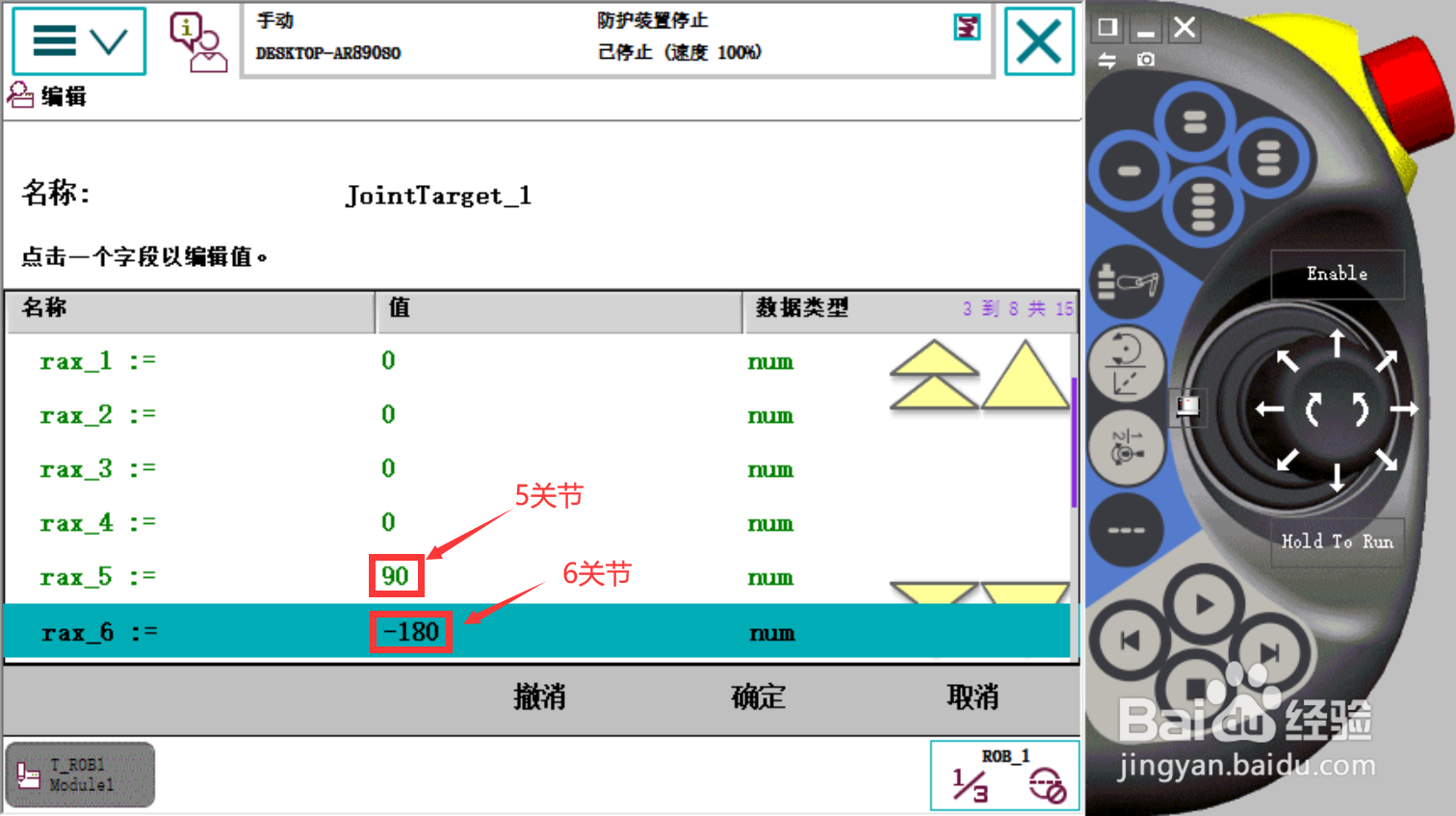
9、Home点仿真操作[调整程序指针]—【Enable】—【启动】,注意观察工具姿态和第5轴的姿态变化。
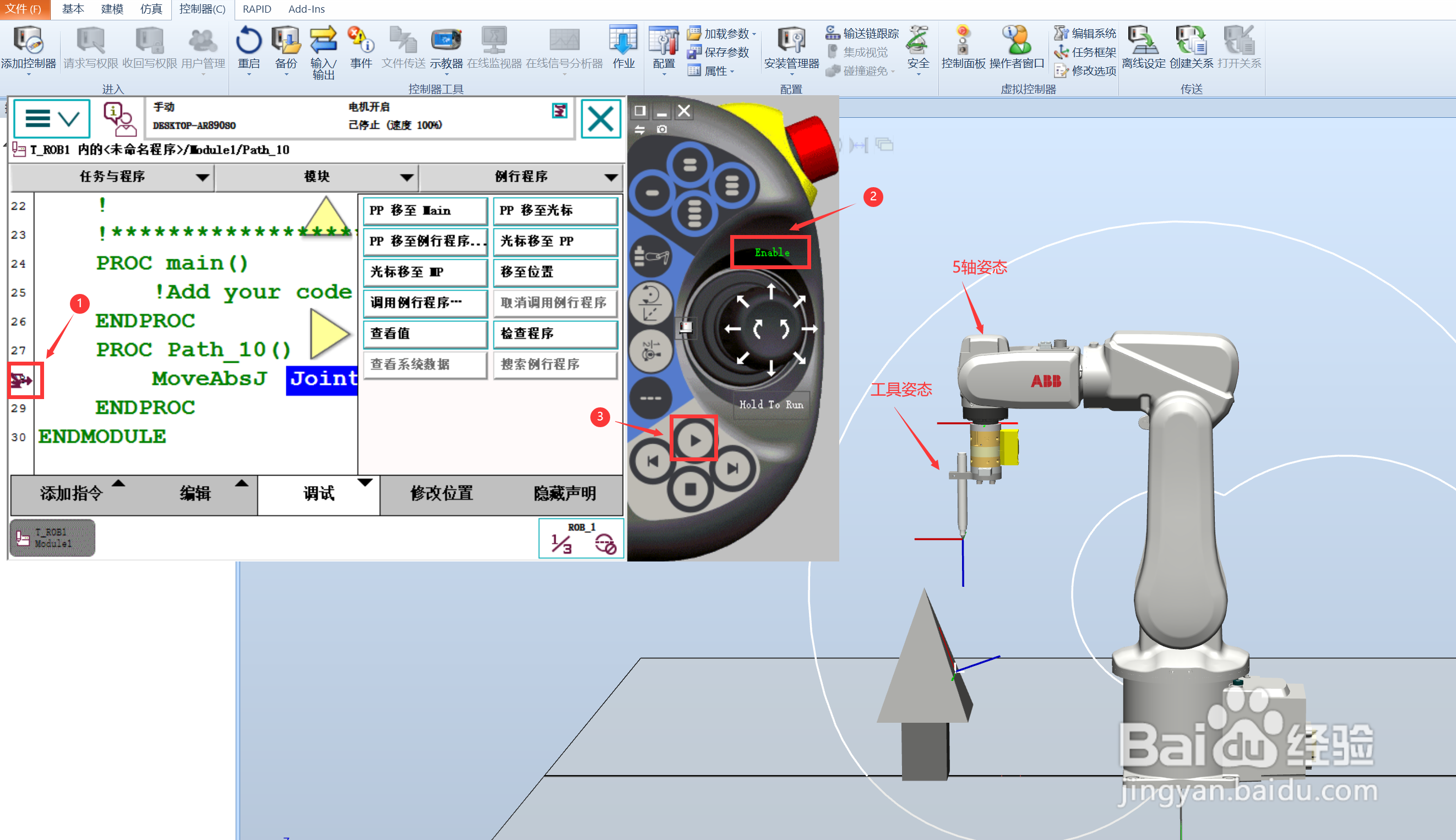
时间:2024-10-13 11:52:50
1、机器人初始位置,注意机器人工具和第5轴的姿态。
2、启动虚拟示教器,【控制器】—【示教器】—【虚拟示教器】。
3、调试虚拟示教器,【自动/手动】—[切换至手动]—左上角【下拉菜单】—【工具】—【工件坐标系】。
4、进入【程序编辑器】。
5、选中【JointTarget_1】—【调试】。
6、选择【查看值】。
7、查看机器人当前六个关节的值。
8、修改机器关节值至Home点位置。
9、Home点仿真操作[调整程序指针]—【Enable】—【启动】,注意观察工具姿态和第5轴的姿态变化。
