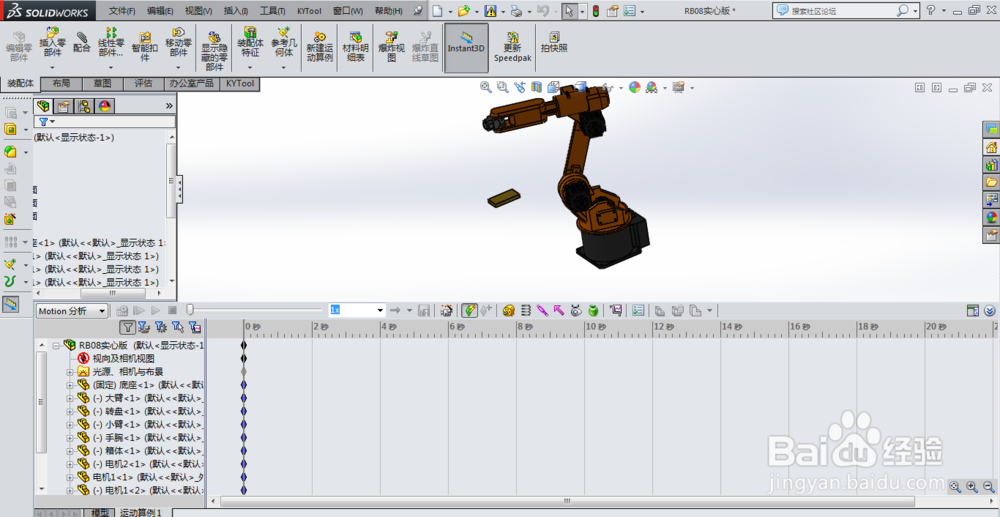
1、定义机械臂,并添加相应的装配配合
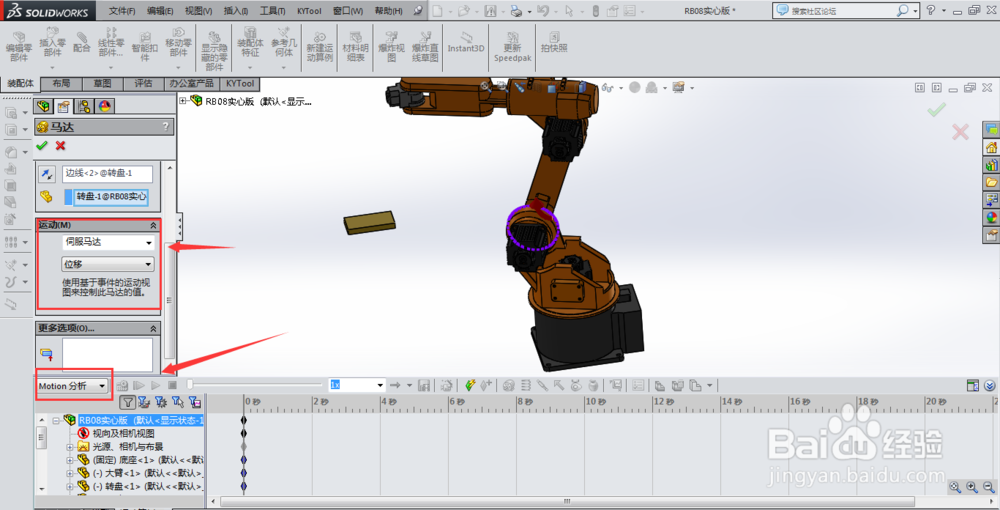
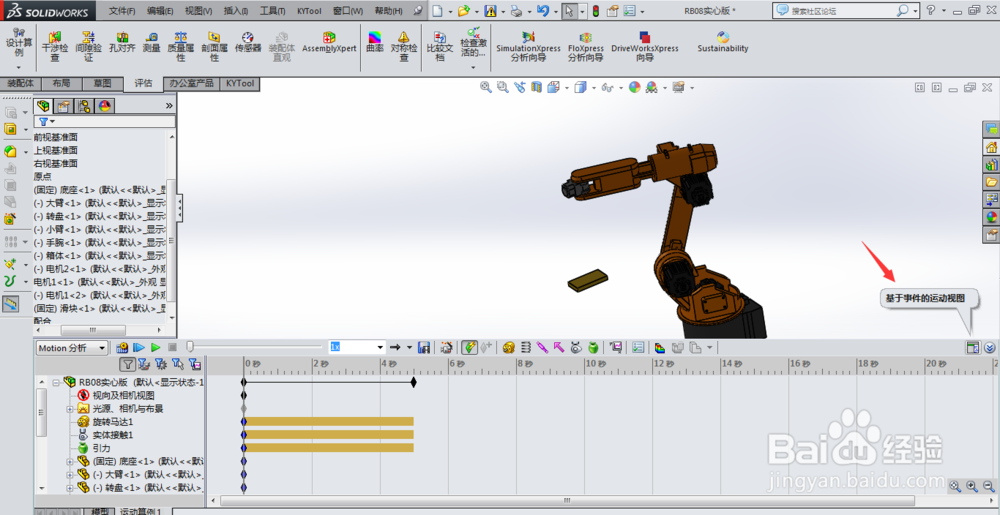
2、创建一个新的运动算例,motion仿真。使用基于伺服马达
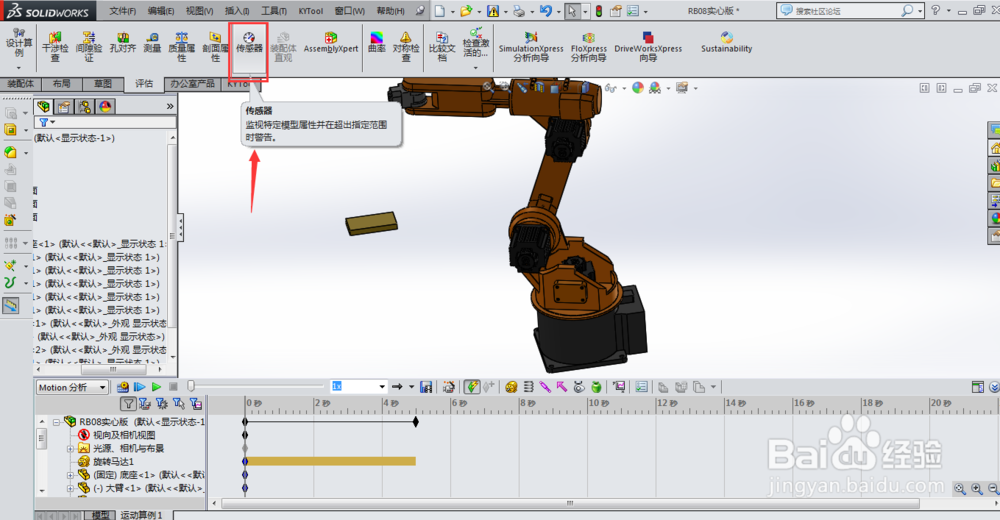
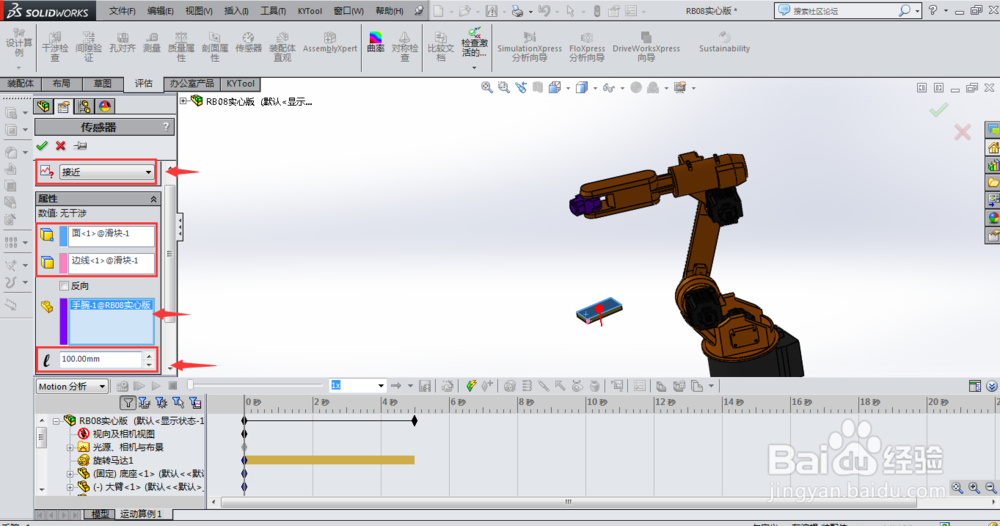
3、添加传感器,并选择接近
4、添加 接触关系,并设置好相应的参数

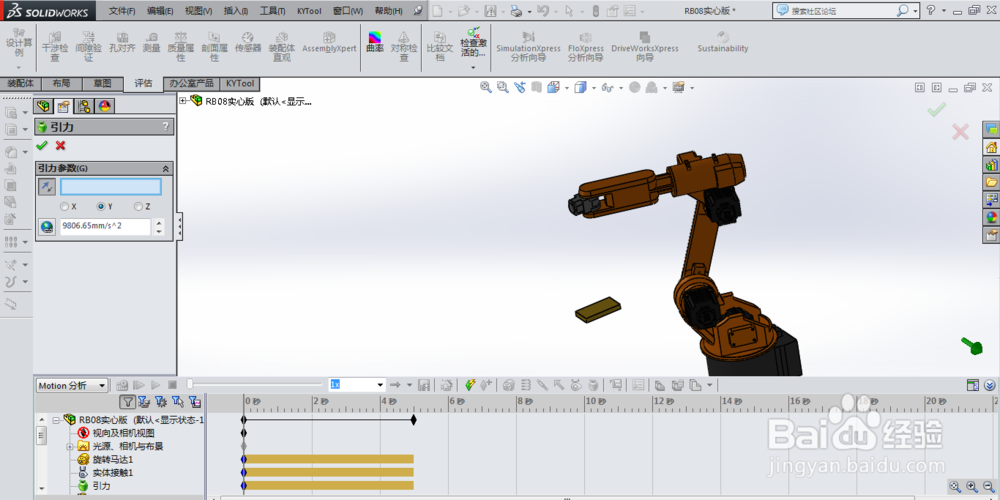
5、添加 引力,对于动画类的仿真,不需要添加引力
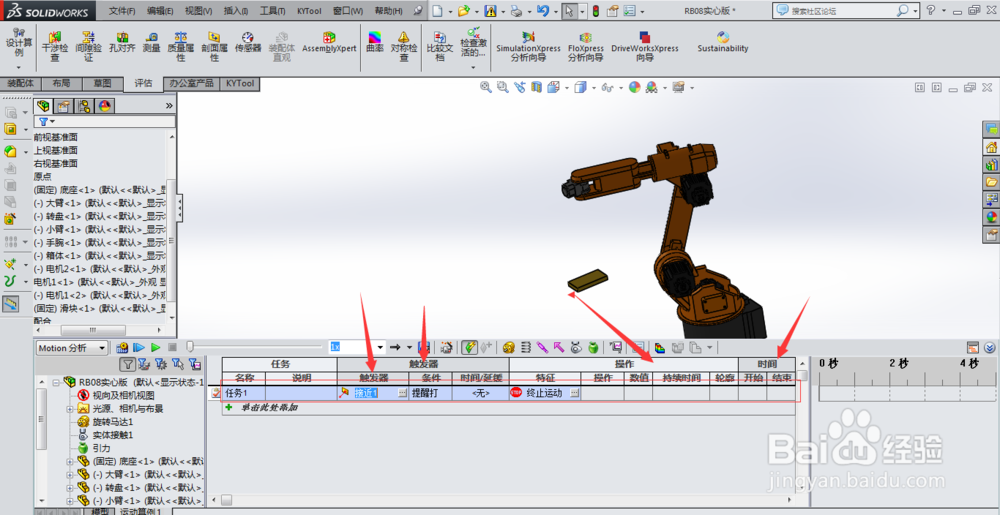
6、设置 任务设计表,定义触发器 触发时的事件及相应的动作等。。。定义完成后,运算。

时间:2024-10-12 10:31:55
1、定义机械臂,并添加相应的装配配合
2、创建一个新的运动算例,motion仿真。使用基于伺服马达
3、添加传感器,并选择接近
4、添加 接触关系,并设置好相应的参数
5、添加 引力,对于动画类的仿真,不需要添加引力
6、设置 任务设计表,定义触发器 触发时的事件及相应的动作等。。。定义完成后,运算。
