1、第9关:由于两侧的小机器人攻击堡垒会被反击,所以我们只能用它们来控制中间的“狙击手”机器人了,也就是利用“信号”来控制中间的“狙击手”机器人,让它来攻击堡垒。

2、左侧小机器人:我们要让这个小机器人控制“狙击手”机器人攻击,所以当堡垒经过时让毋队末哎它发送一个信号,当“狙击手惯墀眚篪”机器人接受到这个信号时就让它来左侧A点开火。第一行代码:设置“信号1关”第二行代码:设置条件“发现敌人”,设置“信号1开”。

3、右侧小机器人:这个机器人的代码和左侧机器人代码类似,只需要将信号从1改成其他就可以了。第一行代码:设置“信号2关”第二行代码:设置条件“发现敌人”,设置“信号2开”。
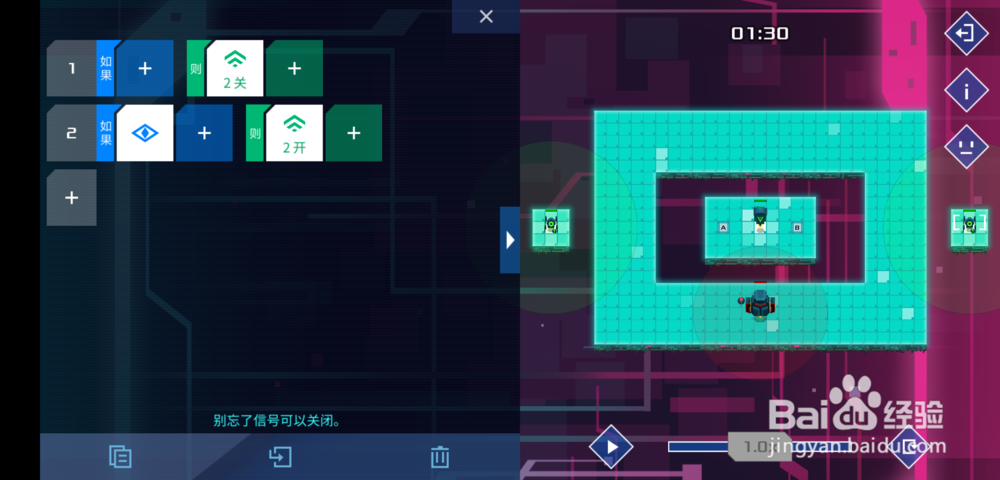
4、中间“狙击手”机器人:“狙击手”机器人需要接受两侧小机器人的信号进行移动和攻击。用于攻击间隔士嫣轶嗄较长所以建议大家让“狙击手”机器人默认“停火惯墀眚篪”。第一行代码:设置攻击模式“停火”。第二行代码:设置条件为“检查信号1”,设置移动模式为“路点A”,设置攻击模式为“开火”。第三行代码:设置条件为“检查信号2”,设置移动模式为“路点B”,设置攻击模式为“开火”。

5、写完代码点击左下角的三角形“开始按钮”执行程序即可,我们会发现:“狙击手”机器人默认设置“停火”会比默认设置“开火”结束的时间快很多哦。

