1、读取图片,并转化为灰度图和二值图像:img=cv2.im筠续师诈read('1.png',0)_,img=cv2.threshold(img,0,255,cv2.THRESH_BINARY)


2、检测四个角点的坐标,只需要检测图像的四个边上的像素即可。
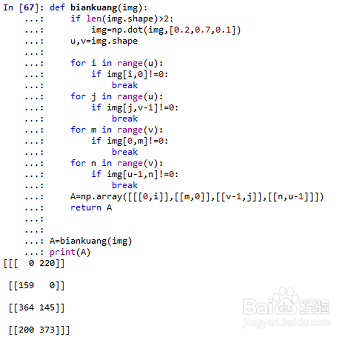
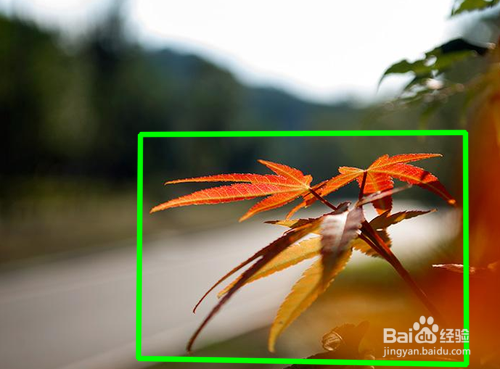
3、在原图中画出这个边框。A=biankuang(img)img=cv2.imread猾诮沓靥('1.png')cv2.polylines(img,[A],True,(0,255,0),3, cv2.LINE_AA)

4、于是,可以借助这个方法,来进行模版匹配。先看原图。

5、下图是经过旋转和缩放的模版。

6、匹配结果如下图所示。请忽略图片上的水印,因为匹配图像的时候,是没有水印的。