1、1:使用“IK样条线控制柄工具”创建IK,点击nesk和点击hip;(1)选中创建IK时附带的曲线,选中“点”,可以控制骨骼移动;(2)使用“重建曲线”,选中创建IK时附带的曲线;


2、2:创建3个骨骼控制器,《1》命名为(1)A_jot_grp和A_jot;(2)B_jot_grp和B_jot;(3)C_jot_grp和C_jot;《2》将它们吸附在曲线点上;《3》选中骨骼控制器A_jot+B_jot+C_jot和曲线yao_crv,“平滑绑定;”


3、3:设置“旋转”;打开腰部线性IK的“属性编辑器”,在“高级扭曲”设置数值;

4、4:创建腰部骨骼的拉伸;《1》获取腰部曲线yao_crv的信息,打开“脚本编辑器”;(1)曲线的长度;(2)给曲线创建节点,实时获取曲线长度信息;《2》打开“材质编辑器”;(1)选中曲线yao_crv的长度节点,“将选定项添加到图表”,点击“输入输出连接”展开节点连接的其他节点;(2)创建个“乘除”节点;(3)连接曲线长度节点curveInfo1d的“arclength”和乘除节点的Input1X;(4)打开乘除节点的“属性编辑器”,调整数值;(5)将骨骼hip~chest,“将选定项添加到图表”;连接乘除节点的“OutputX”和骨骼的“ScaleX”;

5、5:创建腰部骨骼曲线控制器;《1》有3个骨骼控制器就创建3个曲线控制器;《2》“父对象”约束;(1)选中曲线C_yao_crv和骨骼C_jot;(2)选中曲线B_yao_crv和骨骼B_jot;(3)选中曲线A_yao_crv和骨骼A_jot;《3》肩部的控制器跟随腰部控制器旋转;(1)选中控制器A_yao_crv_grp,按“D+V”键,将其中心点吸附在骨骼B_jot处;(2)打开“连接编辑器”;连接控制器B_yao_crv的“rotateX”和控制器组A_yao_crv_grp的“rotateX”;《4》腰部控制器跟随屁股控制器移动;(1)打开“材质编辑器”,选中控制器C_yao_crv和控制器组B_yao_crv_grp,“将选定项添加到图表”,再创建个“乘除节点”;(2)连接控制器C_yao_crv的“translate”和乘除节点 的“Input1”;(3)打开乘除节点的“属性编辑器”,调整数值;(4)选中控制器组B_yao_crv_grp,“冻结变换”;(5)连接乘除节点的“Output”和控制器组B_yao_crv_grp的“translate”;

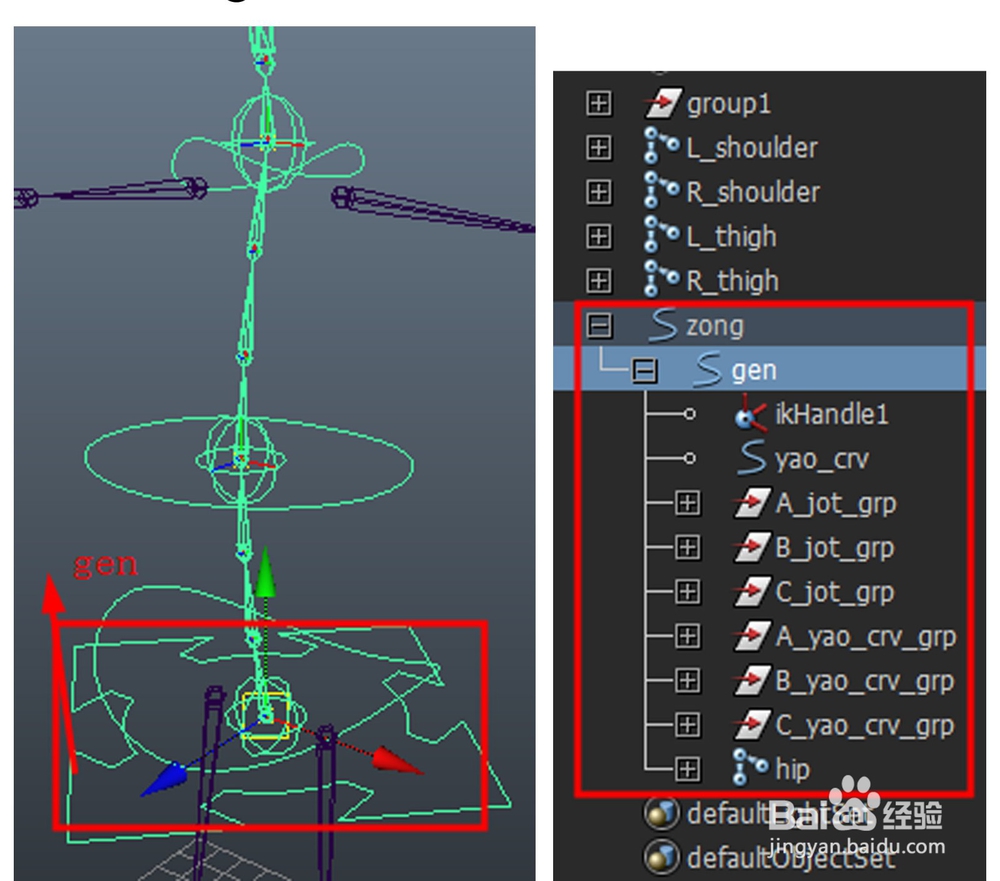
6、6:创建全局控制器;《1》创建一根曲线,命名“zong”,“冻结变换”,将腰部相关骨骼曲线托到“zong”下成为子物体;《2》选中曲线“yao_crv”,打开“属性编辑器”,将“继承变换”的勾选去掉;《3》调整控制器zong的缩放,打开“材质编辑器”;(1)将曲线yao_crv的长度节点和控制器zong,“将选定项添加到图表”;再创建个乘除节点;(2)打开新建乘除节点的“属性编辑器”,将曲线yao_crv的长度值赋予它的Input2X;(3)连接控制器zong的“ScaleX”和新建乘除节点的“Input1X”;(4)连接控制器zong的乘除节点的“OutputX”和曲线的乘除节点的“Input2X”;

7、7:创建腰部总控制器;《1》创建一个控制器,命名gen,吸附在骨骼hip上,“冻结变换”,删除历史;《2》选中控制器gen,鼠标中键托给控制器zong当子物体,躯干的其他骨骼曲线托给控制器gen当子物体;
8、8:腰部次级控制;《1》创建个骨骼和CV圆环,骨骼半径放大点;(1)打开“脚本编辑器”,编写:Parent -add -shape nurbsCircleShape1(CV圆环的形状节点);选中骨骼执行;(2)删除曲线;(3)命名为ci_jot_yao,成组;再复制7个;删除原来的那个,修改命名;(4)将次级控制器鼠标中键托给对应骨骼当子物体,从骨骼neck到Hip;将次级控制器的数值清零;(5)选中次级控制器的点,调整好方向;(6)删除骨骼hip的次级控制器;(7)给控制器gen“添加属性”;(8)给次级控制器设置个开关,打开“设置.....”;

