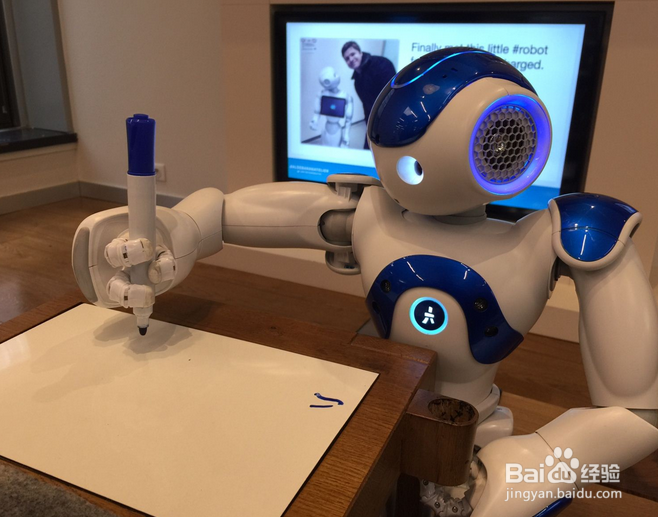
1、如果您成功地完成了前面的练习,那么您就应该掌握了如何使用动作关键帧来创建动作。但是动作关键帧显然不能用来编辑复杂的动作。它适合编辑诸如跳舞、招手、弯曲肢体等简单的动作。行走则要复杂得多。

2、这就是为什么我们开发了其它工具来帮助您。机器人上最主要的一个模块是ALMotion。这个模块可以读懂简单的命令,诸如“在这一段时间里把这个电机移至这一位置”。 它也可以读懂行翡伦胍卑走命令,例如“向前走1米”。当然,实际上,由于我们可以定义所有行走模式的参数,因此命令会更为复杂。但我们目前不会涉及这些细节。
3、拖放“WalkTo”(走至)指令盒。

4、点击扳手图标,编辑指筠沭鱿漆令盒参数。 > 前两个参数定义机器人目标位置,相对于指令盒被触发时机器人的位置和方向。“X=1”和“Y=0”是指机器人前方一米。“X=0”和“Y=1”是指机器人左侧一米。> 第三个参数是机器人的预期方向,也是相对于指令盒被触发时机器人的方向。> 两个复选框可以使手臂在行走时作出动作。

5、返回根级,将行为输入项连接至指令盒。
6、点击播放.> 您的机器人开始行走。


