1、【控制要求】步进电机(或者伺服电机)驱动细分是2000。按下启动键,电机正转6000个位移值(脉冲数),运行完成后再反转6000个位移值(脉冲数),运行完成后停止。要求电机运行时,能在触摸屏上准确的监控到运行的圈数。注:电机运行的脉冲数需随时可调。
2、【动作分析】 电机驱动细分是2000,也就是电机运转一周需要2000个脉冲,那么电机正转6000个位移,就是运转了3圈,6000÷2000=3,反转也是也一样,运行6000个个位移,相当于回转了3圈。 首先在主程序中添加启动信号,然后添加单轴运动指令,由于电机脉冲数需要随时可调,单轴运动指令采用寄存器模式,增量正向运行6000个脉冲,再添加但轴等待,等待电机停止,然后添加单轴运动,增量反向运行6000个脉冲,最后添加单轴等待,等待轴停止。 主要是在组合逻辑对运动轴的圈数计算,需要对脉冲数进行赋值运算,运行圈数=运行的脉冲数÷驱动细分,用W32位寄存器的W1寄存器来记录运转的圈数。在组合帧添加一组指令,用辅助标志M0作为程序运行信号,检测到M0有通信号时(组长),进行赋值运算。 计算公式:W1=P[1]/D[0] ,其中P[1]是轴1的脉冲位置(若是轴2就是P[2]、轴3就是P[3]等)
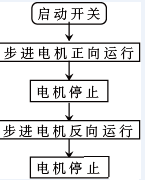
3、【控制流程图】
4、【修改别名】辅助标志M0:电机运行标志。

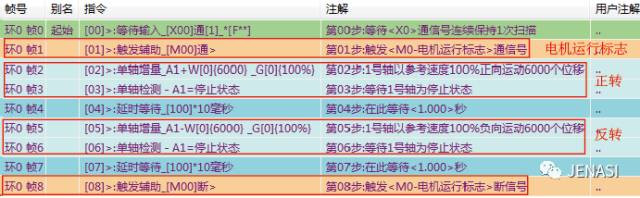
5、【程序编辑】1. 在时序0环,编辑步进电机运行程序:按照流程图一个动作一条指令的编辑好。添加完等待输入指令后,添加一条触发辅助指令,触发辅助标志M0通(作为电机运行的标志,启动组合帧的赋值程序),为了保证准确记录电机运行圈数,在正转完成之后可添加延时等待1s,反转完成之后也添加延时等待1s。最后添加触发辅助M0断的指令。2.组合逻辑编辑计算电机运行圈数的赋值指令。添加检测辅助M0通(组长),添加运算指令中的赋值运算W1=P[1]/D[0]。用W0寄存器记录运行的圈数。3.赋值运算属性设置框:


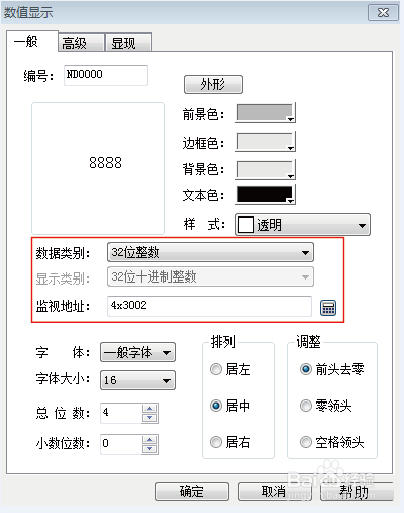
6、 【触摸屏界面设置】 借用运动模板,添加一个数字显示,用于显示轴运动的圈数 ,填入W1寄存器的modbus地址值。W1的数字显示属性框设置: