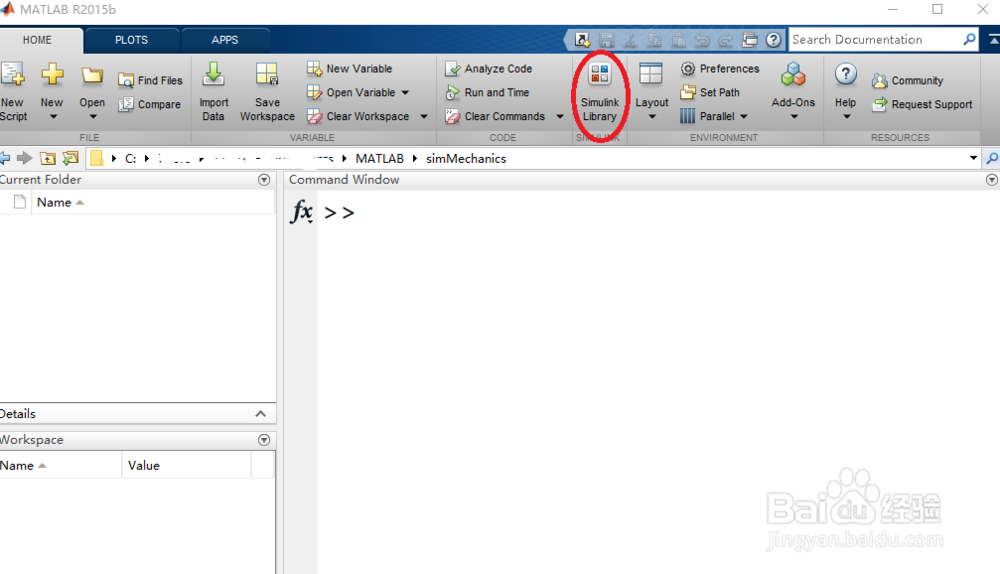
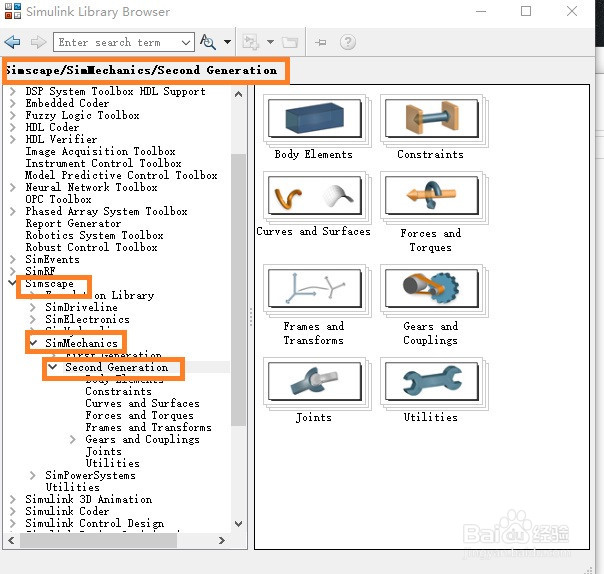
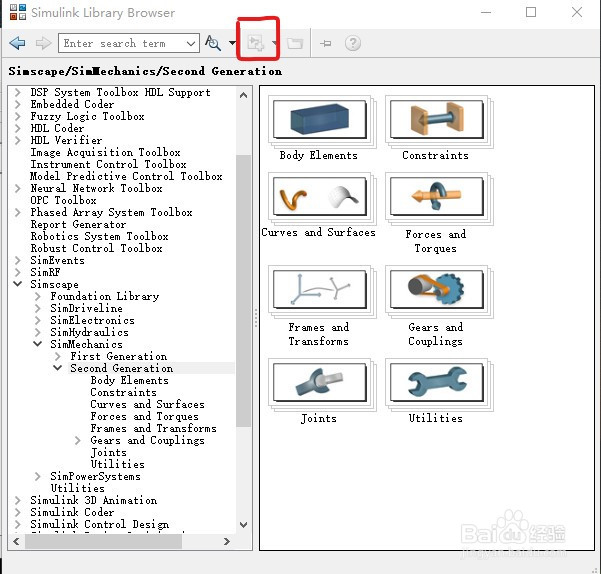
1、打开matlab软件,点击simulink library图标,打开simulink模型库。在左侧导航栏依次点击simscape》Simmechanics》second generation,这就是第二代simmechanics。
2、新建model。在matlab命令行输入smnew,回车,新建一个simulink model。此种方法可以简化建模步骤,可以使新建的模型中自动添加了simmechanics所必需的模块(图中画红框的部分为必需模块,任何simmechanics都需要,如有缺失则会报错无法运行)。也可点击simulink library中的new model图标,新建空白model手动添加各种模块。

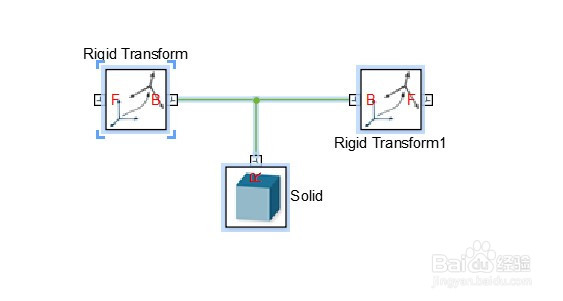
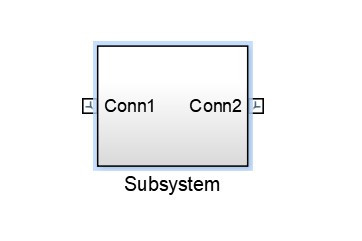
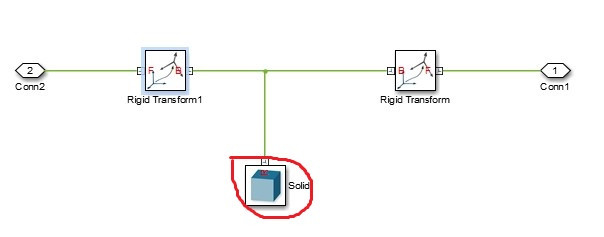
3、制作通用部件模型。将模型中的rigid transform复制,和solid连接成如图形式。然后选择三个模块及其间连线,按下ctrl+g,将其封装,至此,我们做好了一个通用的部件模型。根据你需要的动力学模型的部件数量,对其进行复制,对于机械手来说,多少个自由度就将其复制多少个,二自由度就需要将其再复制两个。(可将subsystem改为自己设定的名字)
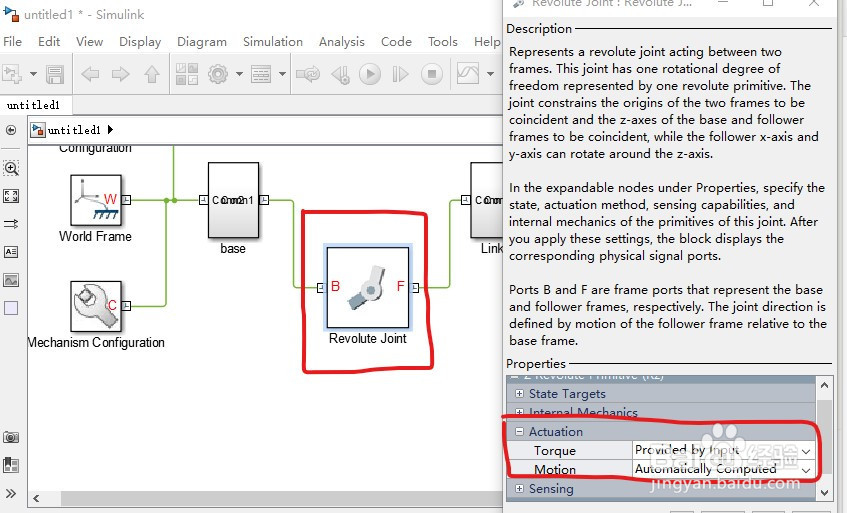
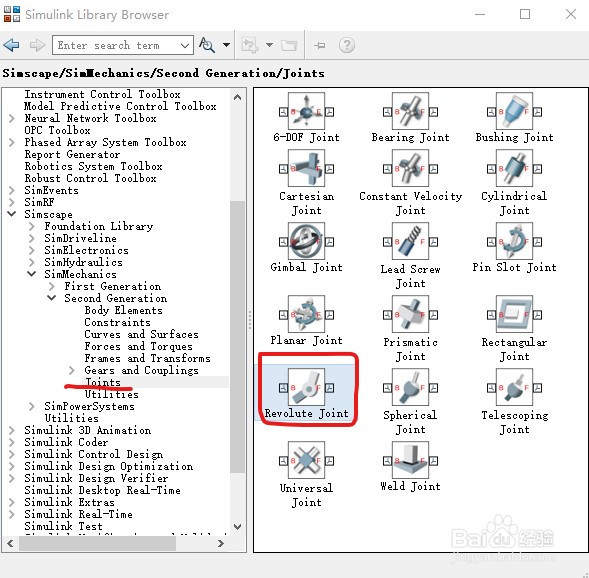
4、搭建动力学模型框架。在simulink库中找到revolute joint,将其拖到model中,路径如图。复制joint,然后将复制好的通用模型和joint依次相连,如图所示。
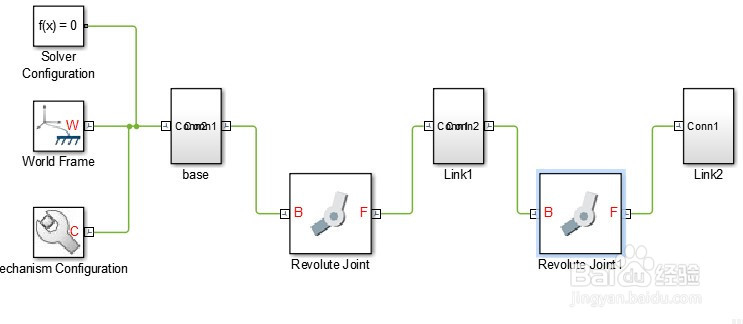
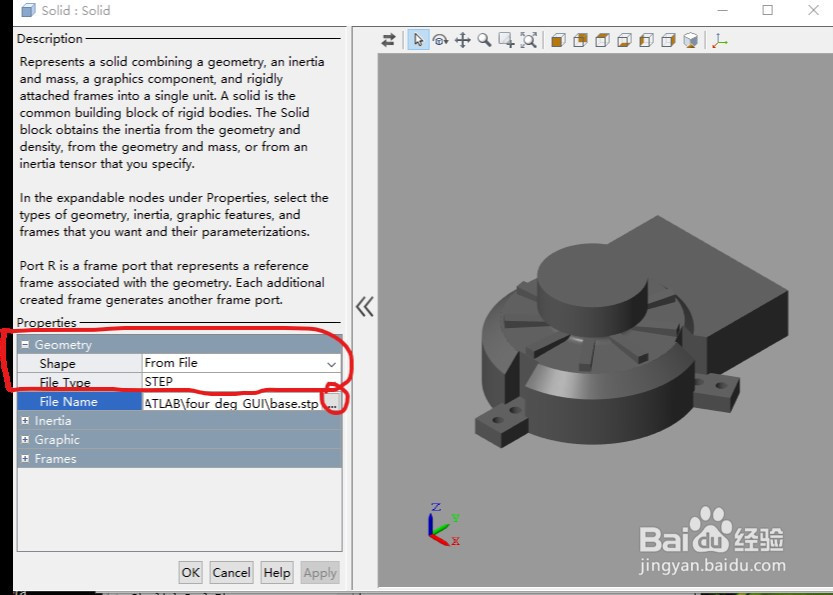
5、导入三维模型,设置模型参数。双击点开base部件,再次双击solid模块,弹出如图窗口。红圈区域,按照图中所示进行设置,在filename栏可点击该栏右端小红框(此处默认是没有东西的,不过点击这块儿就行),会弹出浏览框,定位至相应三维零件即可。按F5刷新,右侧即可出现相应的三维模型。
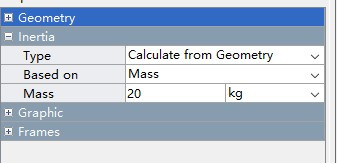
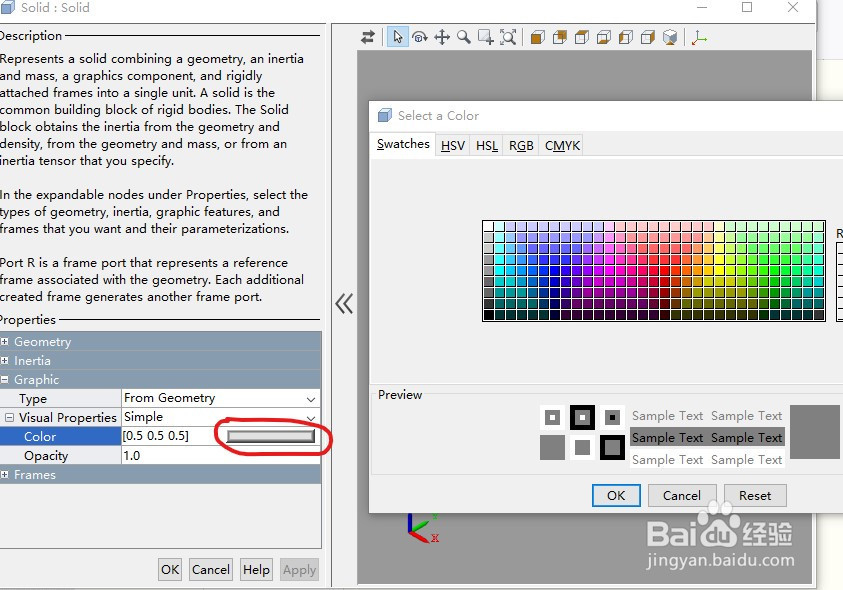
6、选择第二个菜单inertia,按图设置,其中质量按照模型参数填写,此处填写20kg。如要自定义模型颜色,选择第三个菜单Graphic,点击红圈所示处,即可弹出颜色选择窗口,如图。
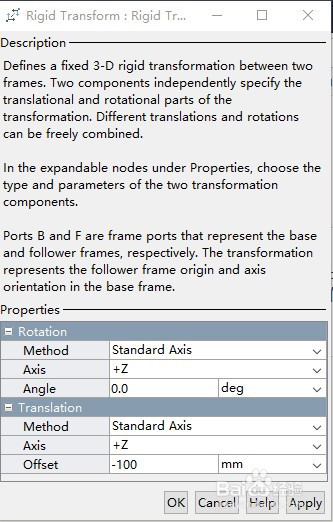
7、设置转换坐标。双击红框处的坐标系模块,弹出窗口,有两个菜单,分别是rotation和translation,代表该坐标系相对于零件建模时的基础坐标系的位姿,该坐标系代表该杆件一端与其他杆件连接处的参考坐标系。按照模型参数进行设置即可。对另一坐标系模块也如此设置。另一坐标系即代表该杆件另一端与其他杆件连接处的参考坐标系。

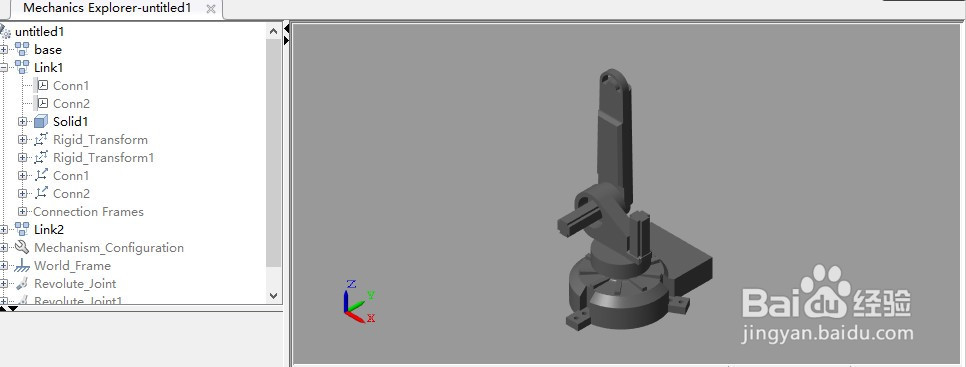
8、对所有的通用部件模型进行5-7步骤的操作。运行模型,即可看到三维效果。这就是所需要的动力学模型。。
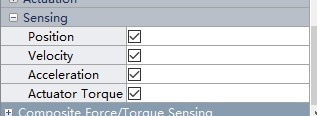
9、根据你的需要,双击joint,设置力的输入接口、传感器输出接口,添加动力源及示波器后,即可看到机械手的动力学曲线以及三维演示效果