学习目标:1、学习蜘蛛结构搭建;2、学习“等待缇吾怩舭—按钮”模块对蜘蛛机器人进行线控;3、实现蜘蛛机器人前行后退。

工具/原料
EV3
电脑
搭建
1、利用大型伺服电机做出蜘蛛的头部结构,这部分的结构用到了很多的齿轮传动结构。


2、蜘蛛的头部用到了一些装饰用的零件,头部细节主要包括了牙齿与眼睛,具体的细节如下图所示:


3、在搭建头部的时候需要注意两侧齿轮的安装,我们要保证每个24齿轮孔位角度的一致性。

4、蜘蛛两侧齿轮上的连杆固定的位置要一上一下错落开开,整体的搭建图如下图所示:

编程
1、实现蜘蛛机器人按键线控功能,前进与后退两个部分。按住前进键,实现前行,松开后停止运动。按住后退键,实现后退,松开后停止运动。进阶程序实现:左键/右键 加速运动。
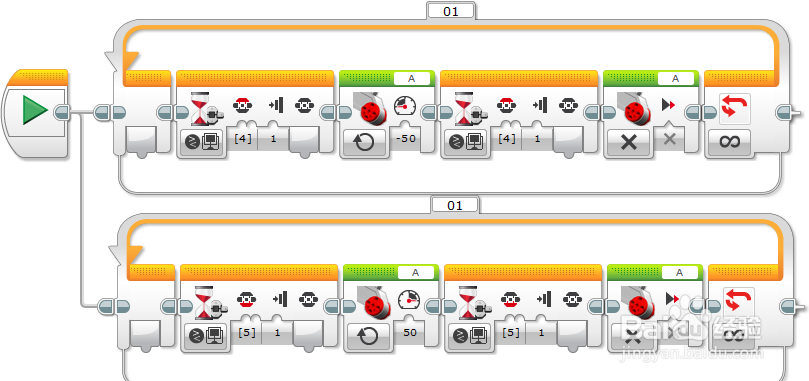
2、开始 +程序块按钮等待模块(设置4号按钮)+大型电机运转(选择开启,功率可调,选择-50, 保证蜘蛛前行)。

3、加入松开按钮停止电机转动模块:程序块按钮等待(4号按钮)状态设置为0(松开)+电机停止转动。

4、然后我们在程序中加入循环模块,这时候“前进”这个过程的完整程序如下图所示:

5、同理,“后退”程序如下,需要修改部分:程序块按钮修改为5,电机功率改为正。

